Spirit & Opportunity
La mission Mars Exploration Rover est une mission se composant d'un doublet de deux rovers, des sondes équipées de roues afin de pouvoir explorer la surface martienne. Ces rovers sont des versions nettement évoluées du petit rover Sojourner, qui a accompagné la sonde Mars Pathfinder, de Juillet à Septembre 1997. Sojourner a servi à valider les futures technologies présentes -en version évoluées- à bord des rovers.
Voici une "photo de famille", avec une partie des ingénieurs en charge de l'assemblage des rovers, ainsi que le rover Opportunity, et Marie-Curie (en fait la soeur jumelle de Sojourner) :

Crédits : NASA/JPL/CALTECH
Mars Exploration Rover est le fruit du travail, pour une grande partie, de Steve Squyre, qui est toujours l'actuel responsable scientifique de la mission. IL faut savoir qu'il s'est considérablement investi, et bien des années avant le départ de la mission, pour un tel projet.
Les deux rovers ont chacun leur propre nom. Ainsi, Mars Exploration Rover 1 s'appelle Opporunity, et Mars Exploration 2, Spirit.
Ces sondes ont été envoyées depuis le Kennedy Space Center en Floride, avec deux fusées Delta2.
Voyons voir maintenant les différents éléments constituant la mission.
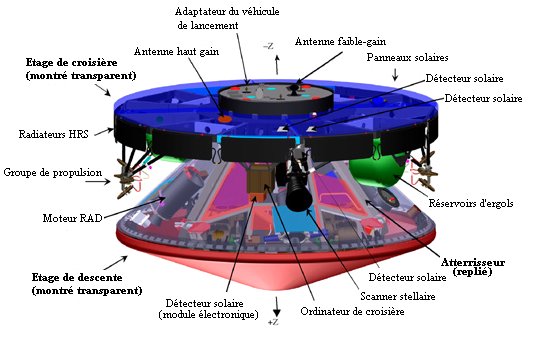
L'étage de croisière
Composé d'un large élément circulaire équipé de panneaux solaire et d'antennes principalement. En dessous, le compartiment contenant le rover.
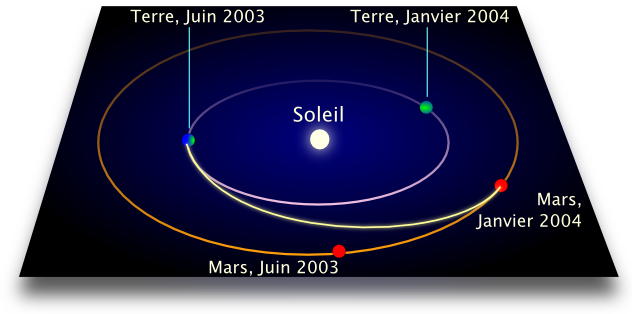
Ici, un schéma montrant le trajet de tout cet ensemble depuis la Terre jusqu'à Mars.
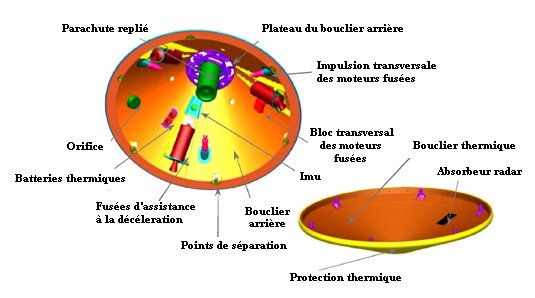
Les étages de descente et d'atterrissage
La sonde, en approchant de Mars et de son influence gravitationnelle, va se libérer de l'étage de croisière. A présent, le travail reviendra à l'étage de descente, que voici :
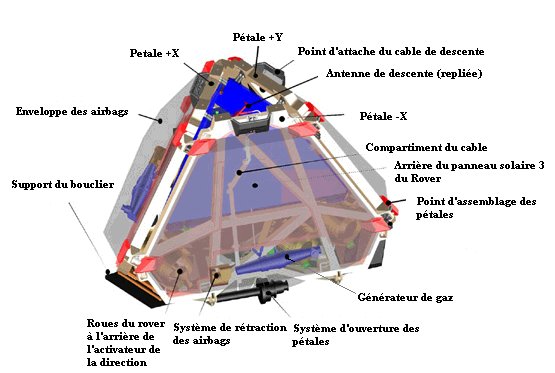
Et à l'étage d'atterrissage, véritable cocon protecteur, qui renferme le rover, replié.
Voici, sous forme de mini-diaporama, les différentes étapes (cliquer pour faire défiler).
Et une fois au sol, l'étage d'atterrissage s'ouvre comme une fleur, exposant le rover à l'air martien. Celui-ci s'ouvre. Voici une petite animation :
La mission peut commencer.
Objectifs et localisation des sondes
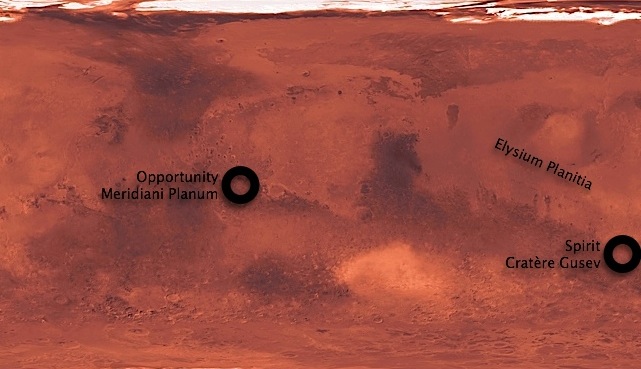
L'objectif affiché de cette mission est simple : trouver des preuves évidentes du passé aquatique de Mars. Deux sites ont particulièrement retenu l'attention des chercheurs : le cratère Gusev, au Sud de Elysium Planitia, ainsi que Meridiani Planum, régions toutes deux fortement présumées avoir été le siège d'une occupation plus ou moins durable de l'eau.
Voici une carte montrant l'emplacement des sites d'atterrissages :
Ainsi que deux vues plus précises de chaque site, avec l'ellipse d'atterrissage :


Les caméras des Mars Exploration Rover
Elles sont de deux sortes :
Il faut savoir que toutes les caméras installées sur le rover sont équipées de capteur CCD de 1024 pixels. Ce qui permet de produire des images de bonne qualité, tout en ayant des images légères et rapides à envoyer.
Les caméras de navigation
Les caméras de navigations fournissent des images en noir et blanc. Elles servent aux contrôleurs sur Terre à se repérer sur le site d'atterrissage. Mais il faut distinguer les deux types de caméras présentes à bord du rover, avec 4 caméras de détection des dangers, et 2 caméras dédiés à la navigation de façon quasi-exclusive. Mais où sont ces caméras?
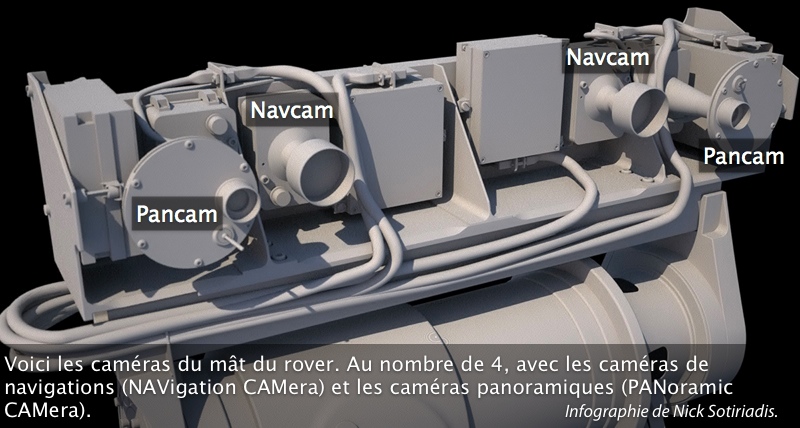
Voici une illustration montrant leur positions.
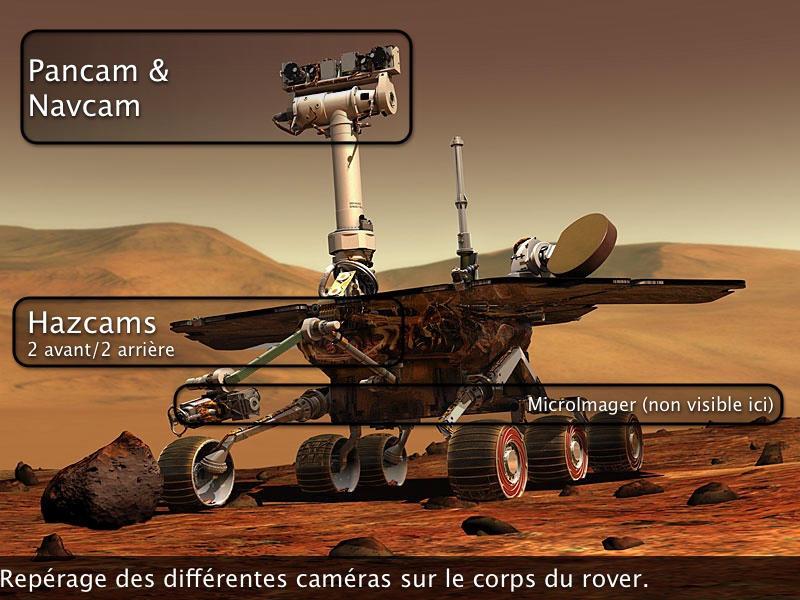
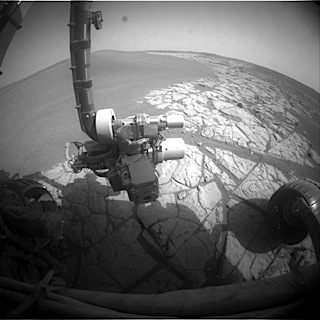
Voyons voir d'abord les caméras de détection des dangers (ou HazCam pour Hazard Avoidance Camera). Celles-ci sont donc situées sous les panneaux solaires du rover, deux à l'avant, et deux à l'arrière. Elles possèdent un large champ, leur procurant une vision "fisheye" de 120°. Cela permet aussi d'avoir une vue sur les roues avant et arrière, très utile lorsqu'il s'agit de se sortir d'une passe difficile (ex : ensablement dans une dune, ce qui est arrivé plus d'une fois au rover Opportunity).
Un exemple de vue procurée par cette caméra :
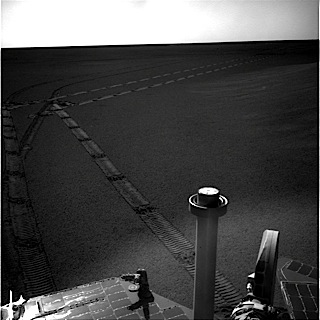
Ensuite, les caméras de navigation (NavCam pour Navigation Camera). Celles-ci sont situées sur le mât d'assemblage des caméras, avec les Pancam, que nous aborderons plus bas. Elles ont un champs plus restreint, de 45°. Cela permet tout de même d'avoir un champ appréciable. Du fait de leur position ces caméras peuvent voir loin, et permettent d'établir des déplacements futurs. Enfin, on peut produire des panoramas complets avec relativement peu d'images, indispensable pour avoir une vue globale rapidement tout autour du rover.
Voici le genre de vue typique produite par cette caméra.
Sur cette infographie, on peut voir où sont placées exactement les Navcam, ainsi que les Pancam. Elles sont par deux. Pour une bonne raison : produire des vues stéréoscopiques, indispensable quand on veut évaluer avec précision les reliefs, et produire des cartes d'élevation à partir de ces images.
Les caméras scientifiques
La mission première des rovers sur Mars est bien évidemment scientifiques. Ils apportent donc avec eux tout un bagage d'outils d'acqusitions de donnée scientifiques, dont des caméras. Il y en a deux :
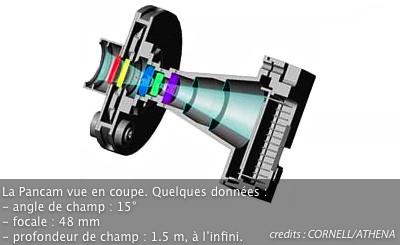
La Pancam est la seule caméra pouvant produire des vues en couleurs. Elle possède une capteur CCD identique à la Navcam, qui est en noir et blanc. Alors où réside l'astuce? Dans le fait qu'elle possède tout un jeu de filtres colorés. Ces filtres, en passant devant la CCD, ne vont laisser passer qu'une infîme partie de la lumière, soit des longueurs d'ondes visibles (pour produire des images en couleurs classiques) ou dans des longueurs d'ondes invisibles (pour produire des images dites "en fausses couleurs" qui permettent de mettre en évidence des différences de composition basiques dans les roches environnantes), et enfin, un filtre solaire (pour prendre des images du disque solaire afin d'évaluer la transparence de l'atmosphère) et un filtre neutre pour prendre des images en noir et blanc non-altérées. Son angle de champs est de 15° environ.
Voici une image montrant une partie de la Pancam, démontée, avec la roue à filtres colorés.

Et une vue en coupe du système optique.
Un exemple de vue que produit cette caméra :

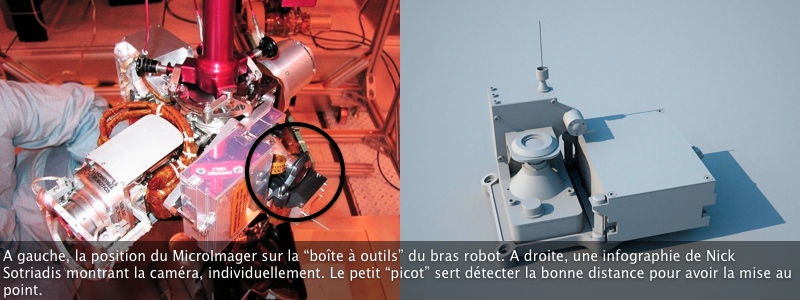
Enfin, il reste une caméra, un peu à part, qui est le Microscopic Imager. C'est une caméra située sur le bras robot de la sonde. Elle permet d'avoir des vues très détaillées et proches du sol, avec une résolution équivalent à la dizaine de micro-mètres. Cette caméra est pourvue d'une filtre qui fait office de "pare-poussière". Coloré, il "peut" éventuellement servir à produire des vues en couleurs. Mais à cause d'une bande passante élevée, les vues en couleurs sont difficiles à calibrer.
Voici où est cette caméra :
Un exemple de vue produite par cette caméra :

Voilà, nous savons à peu près tout ce qu'il faut savoir sur ces différentes caméras. C'est essentiel car c'est déjà une partie du travail accompli pour pouvoir mieux traiter les images de ces rovers.