
Marsrover 2020. Un clône de Curiosity, mais avec de sérieuses mises à jour et améliorations. On apprends des erreurs passées. Comme par exemple concernant les roues du rover. Sur Curiosity celles-ci se sont vite dégradées avec le temps. C'est fini avec Perseverance : les roues ont subies de gros changement et devraient être plus robustes et à même d'affronter les terrains les plus accidentés, sans se faire mal. Perseverance est véritablement un Curiosity sous amphétamines.
Voici la bête, en salle blanche :

Crédits : NASA/JPL-CALTECH
Cette machine est un véritable laboratoire scientifique mobile, avec une quantité invraisemblable d'instruments, de missions comme on dit, avec plusieurs objectifs, dans la continuité des rovers précédents. A savoir déterminer si la vie a pu émerger sur Mars, trouver des traces d'eau passées ou présentes, faire des relevés climato et météo de la surface de Mars ainsi que des études géologiques du site d'atterrissage. Et un onglet plus particulier puisqu'il s'agit de préparer l'arrivée de l'être humain sur Mars (via la test de technologies permettant de fabriquer du carburant à partir de l'atmosphère ou du sol de Mars). Les différentes missions embarquées par Perseverence sont les suivantes :
Le lancement et le voyage
Le lancement a été effectué le 30 Juillet 2020 pour un atterrisage sur Mars 7 mois plus tard le 18 Février 2021 à 20h55 T.U..
L'entrée, la descente et l'atterrissage
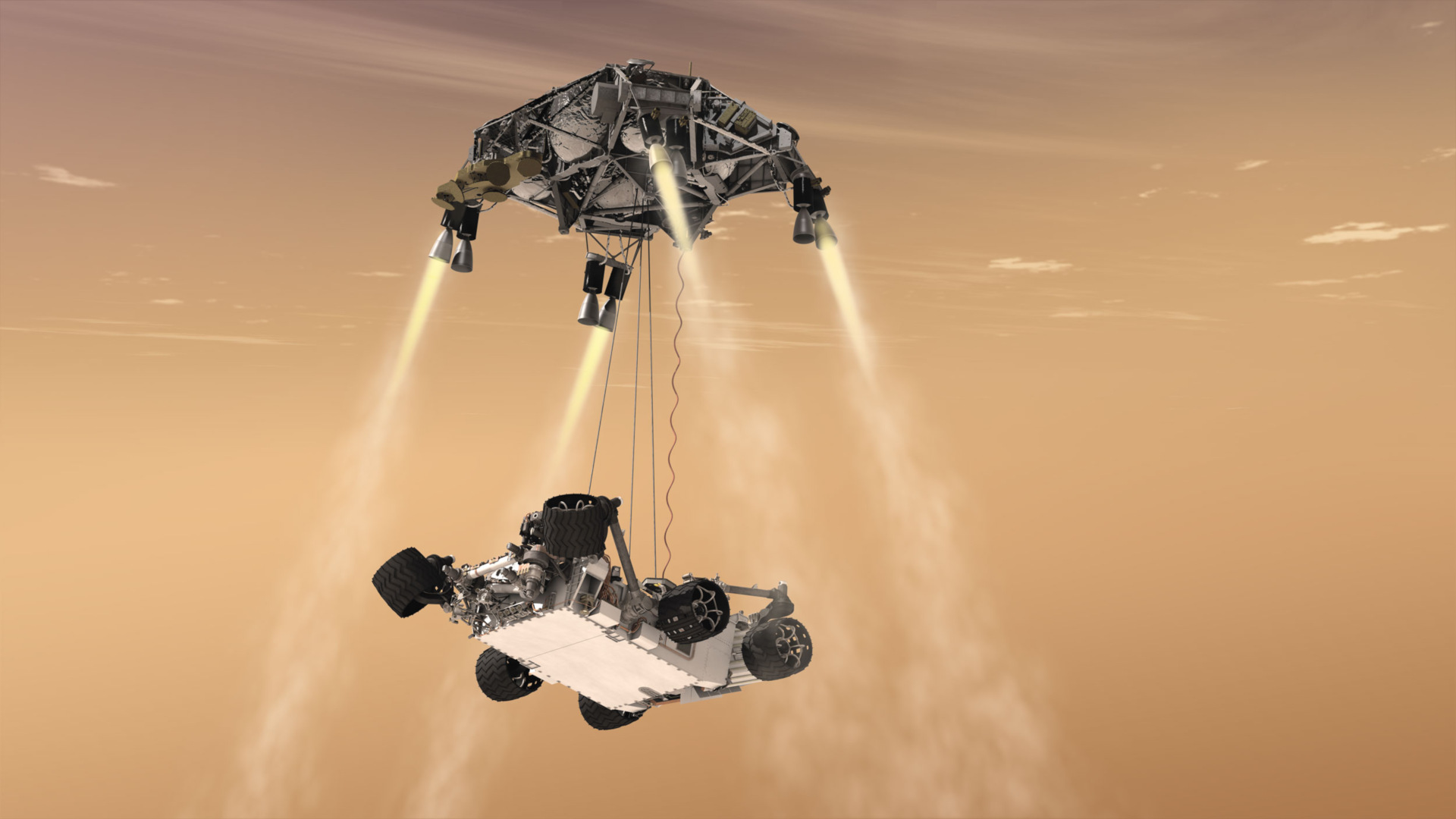
Crédits : NASA/JPL-CALTECH
Comme le suggère l'image ci-dessus montrant l'atterrisage de Curiosity en 2012, celui de Perseverance est en tout points identique. Avec quelques mises à jour, évidemment, déstinées -pour faire gros- à améliorier la précision de l'atterrisage, avec la possibilité pour l'engin d'ajuster en temps-réeel le ciblage du site. Mais là où l'EDL fera parler de lui, c'est au niveau des données visuelles et auditives rapportées. Sur le bouclier arrière une caméra qui regardera en haut pour voir le déploiement du parachute, et l'autre, sur l'étage de descente (skycrane) qui regardera en bas pour voir la descente de l'ensemble rover le long des câbles. Et sur le rover, deux autres caméras, pour enregistrer des images vers le haut et vers le bas du rover. Cela permettra d'obtenir pour la première fois des images d'un atterrisage sur Mars. Comment ça se passe au moment du largage depuis le bouclier arrière ? Comment se comportent les rétrofusées du skycrane ? Quelle est l'attitude générale de l'ensemble durant sa descente ? Et au moment de l'atterissage, comment ça se passe vraiment ? Des microphones finissent d'équiper l'ensemble.
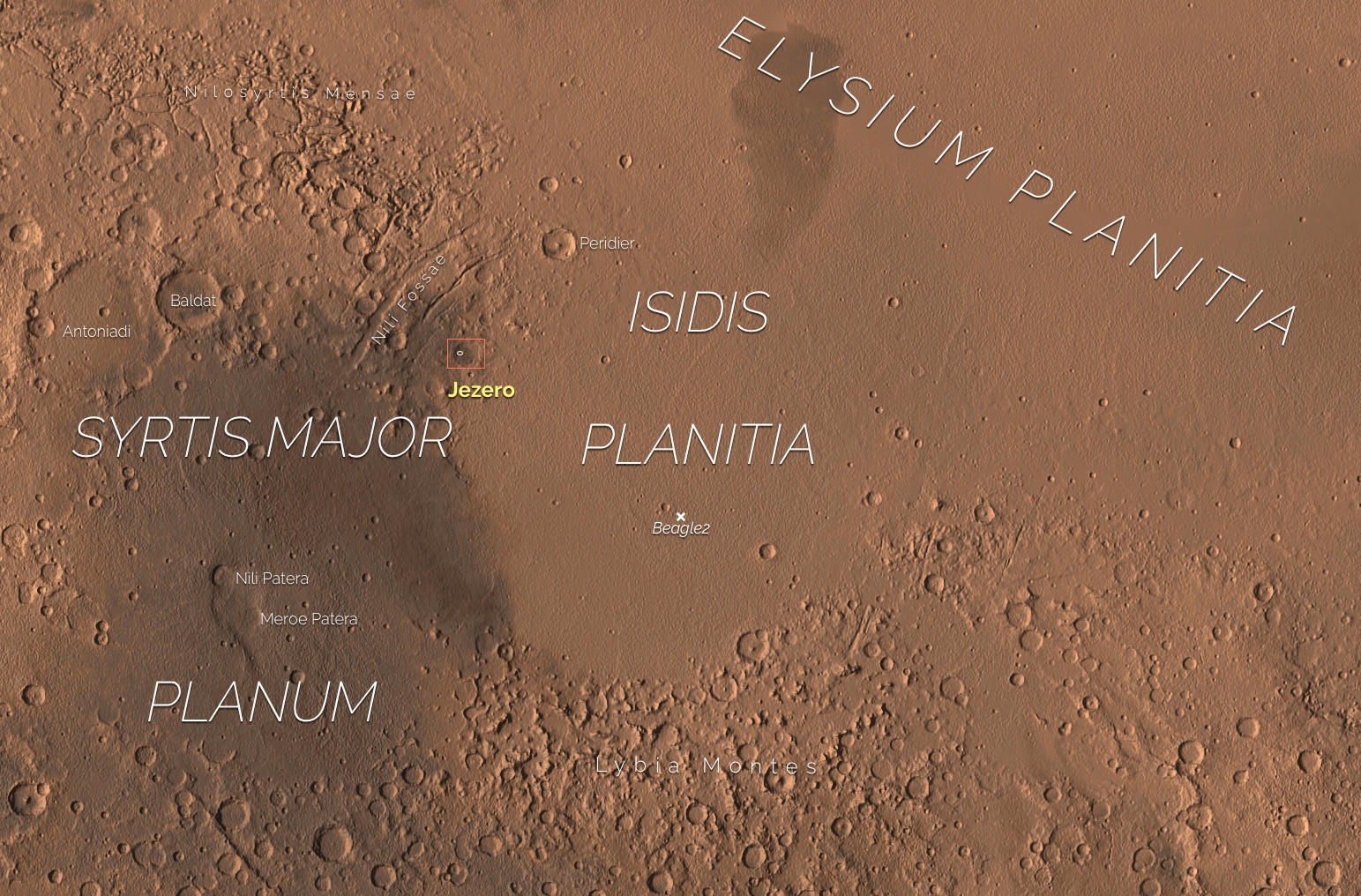
Site d'atterrissage
Le site d'atterrissage de la mission se situe sur la bordure du cratère Jezero, un cratère mesurant environ 50 km de diamètre, soit la moitié de la taille d'un département français environ.
Voici sa localisation parmi des élements bien connus des féru'e's de Mars, l'ellipse d'atterissage est visible, et le rectangle autour situe l'image qui suit celle-ci, afin d'aider à comprendre la localisation :
Le cratère Jezero, complet, avec l'ellipse d'atterrissage, plus visible. Celle-ci se situe à cheval sur un delta alluvial, dont la forme prouve de façon évidente la provenance hydrologique. C'est sur ces rivages dantan que la sonde va conduire sa mission. Cliquez pour agrandir (17,4 Mo). Le rectangle représente le cadre de l'image qui suit celle-ci.
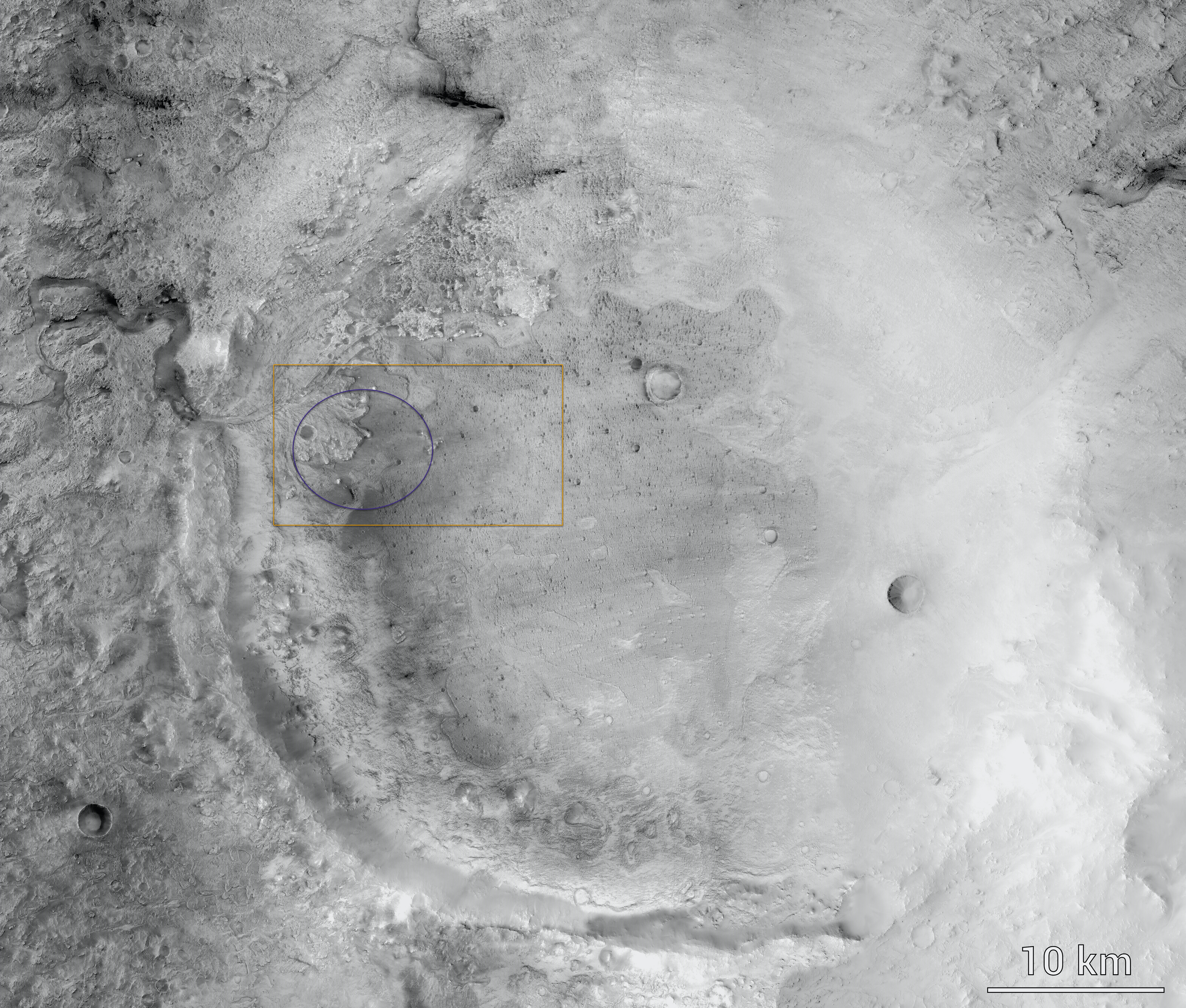
Crédits : NASA/JPL-Caltech/MSSS/Tanya Harrison/Damia Bouic
Et une vue HiRise encore plus détaillée du site, et l'ellipse d'atterrisage ainsi que l'endroit précis où s'est posé le rover. Cliquez pour agrandir (4,3 Mo).

Crédits : NASA/JPL-Caltech/UArizona/MSSS/Damia Bouic
Cette dernière image aura été capturée par HiRise (la caméra de la sonde MRO) peu de temps après l'atterrissage de Perseverance, et montrant en évidence les différents éléments du système d'entrée, de descente et d'atterrissage. Le rectangle jaune de l'image ci-dessous permet de localiser précisément le contexte. Cliquez pour agrandir (3.8 Mo)
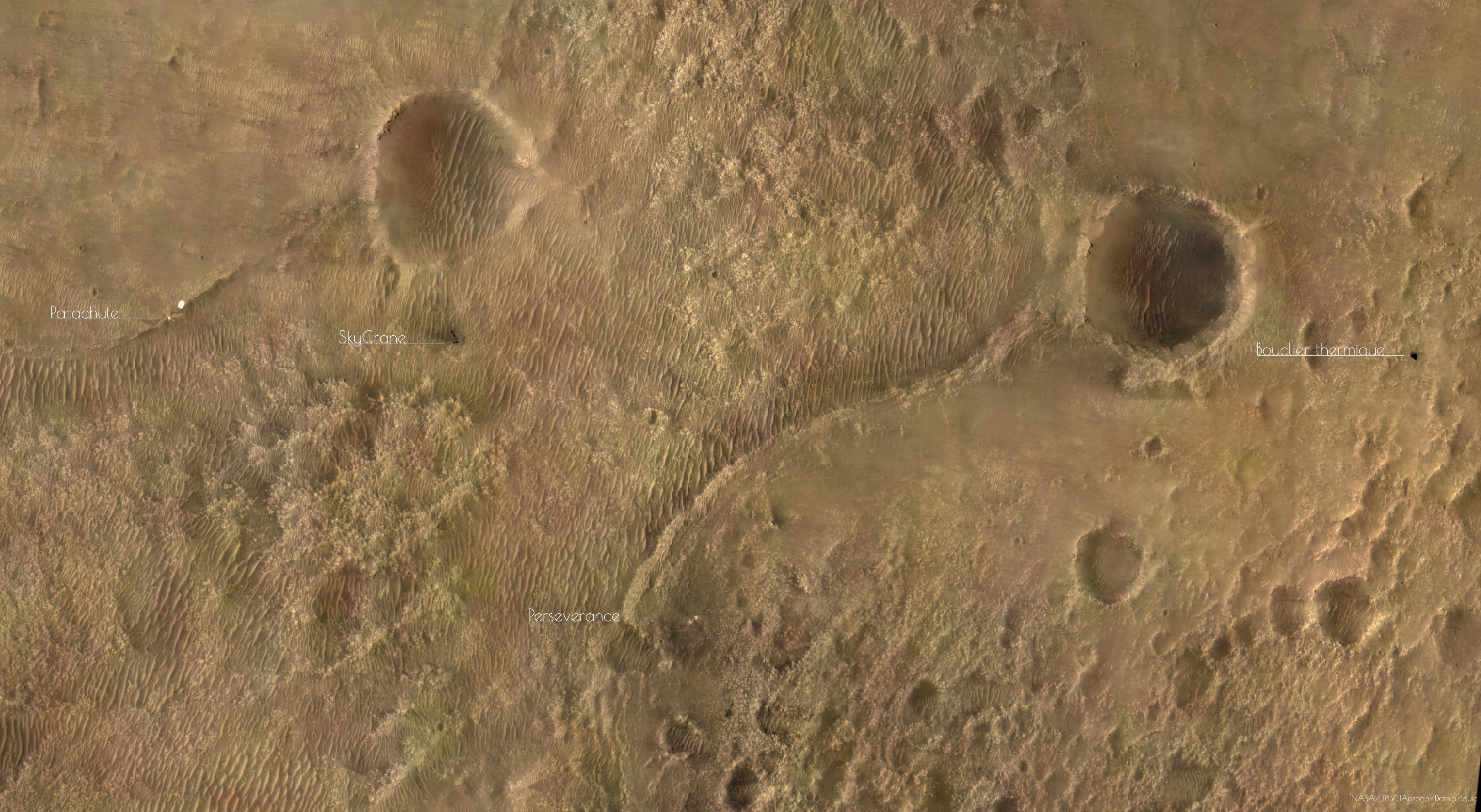
Crédits : NASA/JPL-Caltech/UArizona/MSSS/Damia Bouic
Les caméras
Nous y venons enfin. Les caméras. Et quelles caméras ! Si j'avais été bluffée par les caméras de Curiosity, je suis époustouflée par celles-ci. C'est bien simple : jamais autant de caméras auront été embarquées sur Mars.
Tout d'abord, les caméras de navigation. Adieu les capteur 1024px noir et blanc, bonjour les capteurs couleurs HD ! Voici ci dessous ces caméras, avec à gauche une Navcam et à droite une HazCam. Notez le bulbe de l'objectif propre aux ultra-grand-angles.
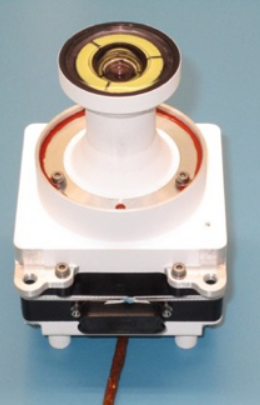

Crédits : NASA/JPL-CALTECH
Ci-dessous, une image Navcam. Les couleurs sont nettes et on voit clairement l'effet fisheye du à l'objectif (un objectif recilinéaire aurait été plus complexe à mettre en œuvre vu l'angle de champs). L'évolution est radicale.
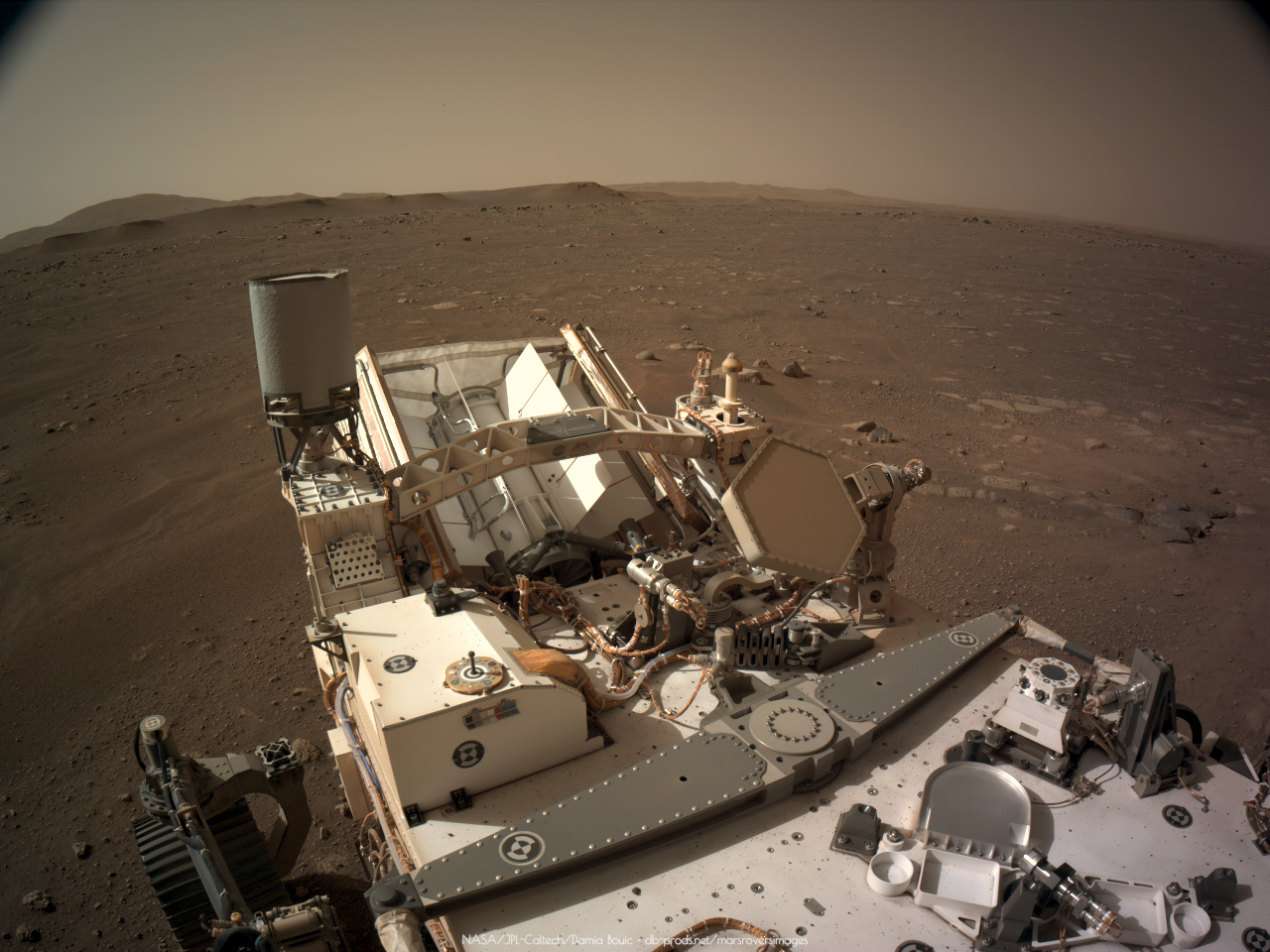
Crédits : NASA/JPL-CALTECH/Damia Bouic
Ici, une images Hazcam. Encore une fois, l'imagerie n'a plus rien à voir avec les désormais antiques caméras noir et blanc 1024px.
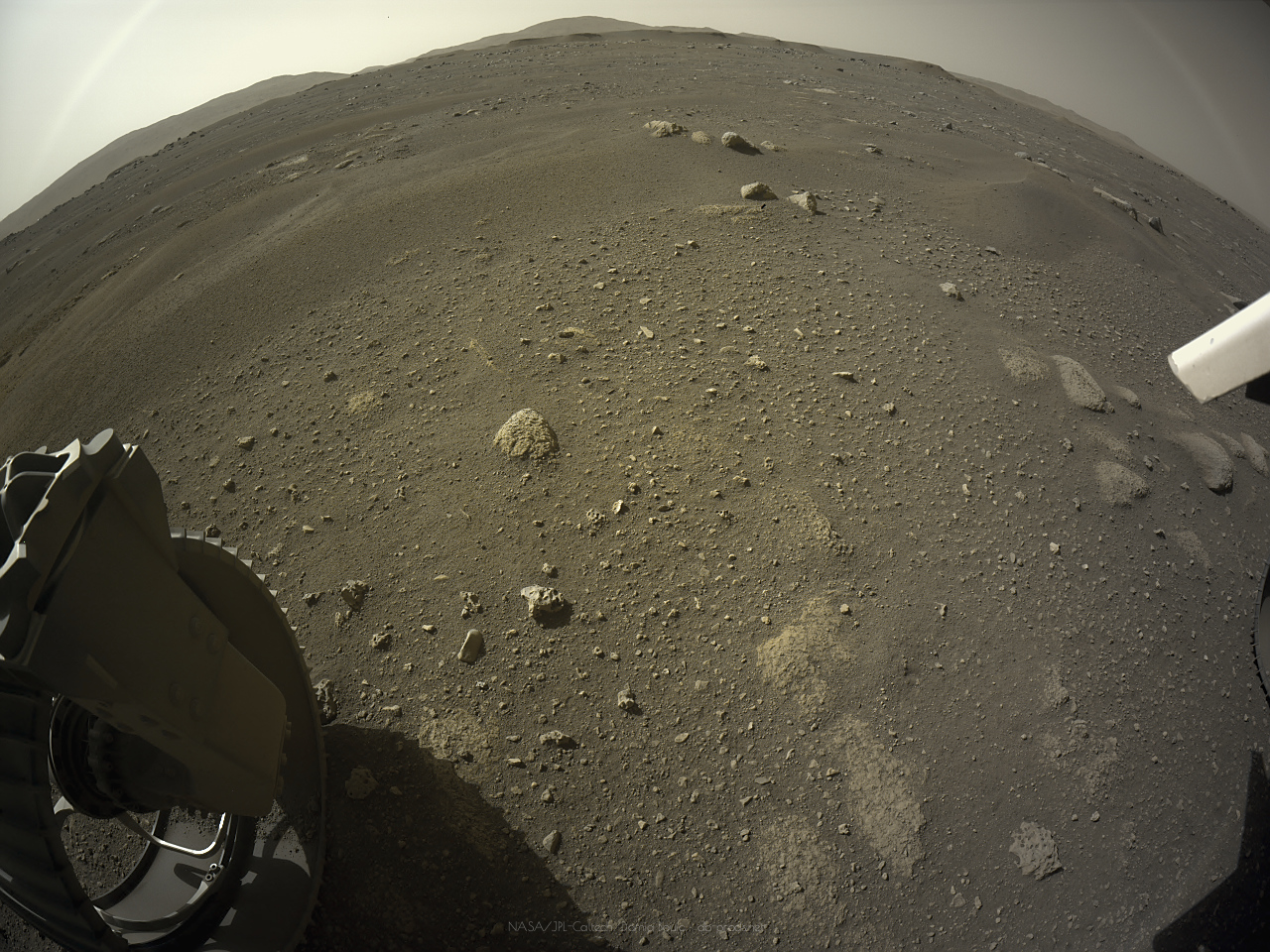
Crédits : NASA / JPL-Caltech / MSSS / Damia Bouic
Les spécifications de ces caméras sont les suivantes.
Parmi les caméras dites techniques, on en retrouve une, un peu à part, qui s'appelle Sample Camera, ou CacheCam (caméra des échantillons), aux mêmes capacités colorimétriques, mais située dans le rover, chargée de photographier les échantillons prélevés sur site, afin d'en obtenir le portrait détaillé.
On continue par LA caméra la plus intéressante, à savoir la Mastcam-Z. Une caméra incroyable puisqu'il s'agit d'un véritable téléobjectif équipé d'un zoom. Voici les détails techniques :
Groupées en paire, celles-ci pourront réalises des images stéréoscopiques. Voici ci-dessous l'une des caméras avant son envol :
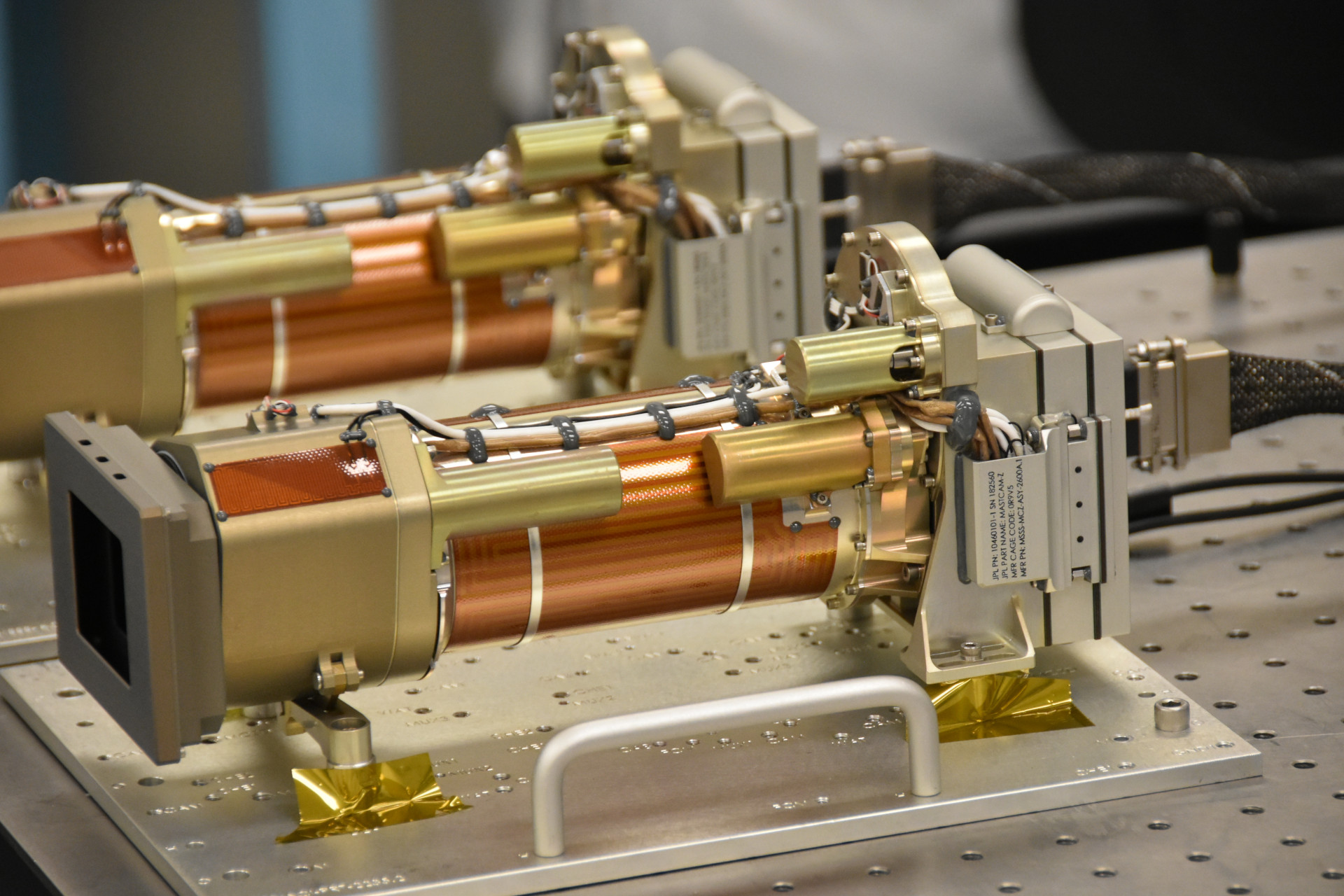
Crédits : NASA/JPL-CALTECH
Voici où se situent ces caméras au sommet du mât des caméras :

Crédits : NASA/JPL-CALTECH/Damia Bouic
Il existe enfin deux caméras qui complètent le bagage de l'imagerie scientifique. La caméra WATSON, identique à la caméra MaHLI de Curiosity, située sur le bras robot, qui réalisera diverses opérations, dont, on s'en doute, des prises d'autoportraits.
Et une dernière, qui s'appelle SkyCam, pourvue d'un capteur noir et blanc CCD à 1024px, montée directement sur le pont du rover, pourvue d'un objectif fisheye, dont le but est d'acquérir des images du ciel complètes.
Pour conclure…
Perseverance constitue une mission incroyable, qui peut commencer !